
语义分割常用数据集ADE20K与Cityscapes
ADE20K
项目地址:https://github.com/CSAILVision/ADE20K
数据规模:
- 训练集:25574;验证集:2K;测试集:3K
- 内容:365个场景;3688个类别。
ADE20K 的数据集,可用于场景感知、解析、分割、多物体识别和语义理解。
图像涵盖了SUN和Places数据集中的场景,官网可视化给出了目标、部件和注释示例的数量的列表。
树状表只展示了带有超过 250 个注解示例的目标,以及带有超过 10 个注解示例的部件。

一些类别可以既是目标,也是部件。例如,一个「门」可以是一个目标(在一张室内图片中)或者一个部件(当它是车的一个门时)。一些目标经常是部件(比如一条腿、一只手),尽管在某些情况下它们看起来与整体是相互独立的(比如车库中的汽车轮子)。
而有些目标则永远不是部件(比如一个人,一辆卡车等等)。依据于部件所属的目标,相同的名称类别(比如门)可对应于若干个视觉范畴。例如,一个汽车的门从视觉上看是不同于一个橱柜的门的。然而它们也共享一些相似的可供性(affordance)。
当目标不是另一个目标的一个部件时,其分割掩码将出现在 * _seg.png 内。
如果分类是一个部件,则分割掩码将出现在 * _seg_parts.png 内。正确检测目标需要区分目标是否表现为独立目标,或者是否是另一目标的一个部件。

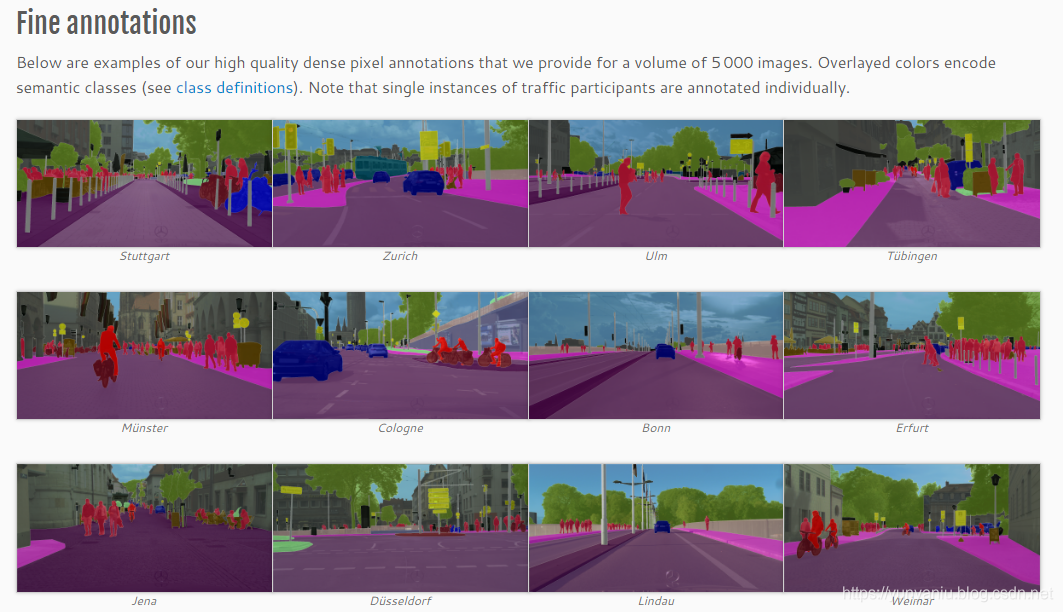
Cityscapes
项目地址:https://www.cityscapes-dataset.com/dataset-overview/#class-definitions
数据规模:
- 训练集:2975;验证集:500;测试集:1525
- 内容:50个城市,30个类别

Cityscapes数据集包含2975张图片。包含了街景图片和对应的标签。大小为113MB。Cityscapes数据集,包含戴姆勒在内的三家德国单位联合提供,包含50多个城市的立体视觉数据。
All articles in this blog are licensed under CC BY-NC-SA 4.0 unless stating additionally.










